





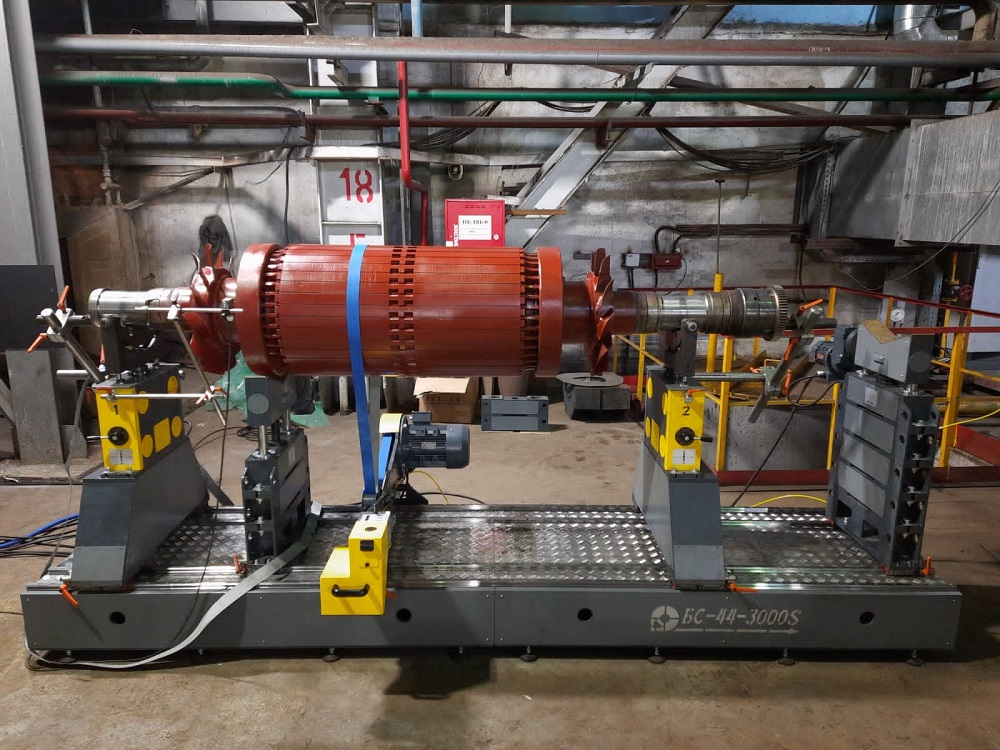
Balancing machine for electric motor armatures BS-44-10000S
- Maksimaalne mass rootor:
- 10000
- Minimaalne mass rootor:
- 50
- Maksimaalne Ø balansseeritav rootor:
- 2750
- Minimaalne saavutatav jääkdisbalanss Umar, g x mm/kg:
- 0,25
KIRJELDUS
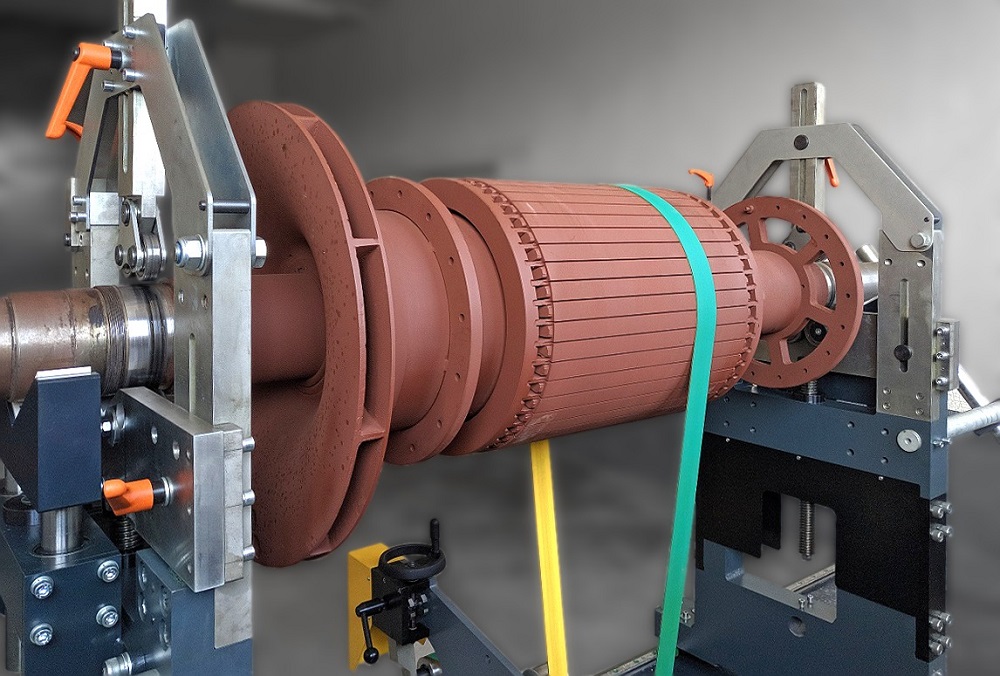
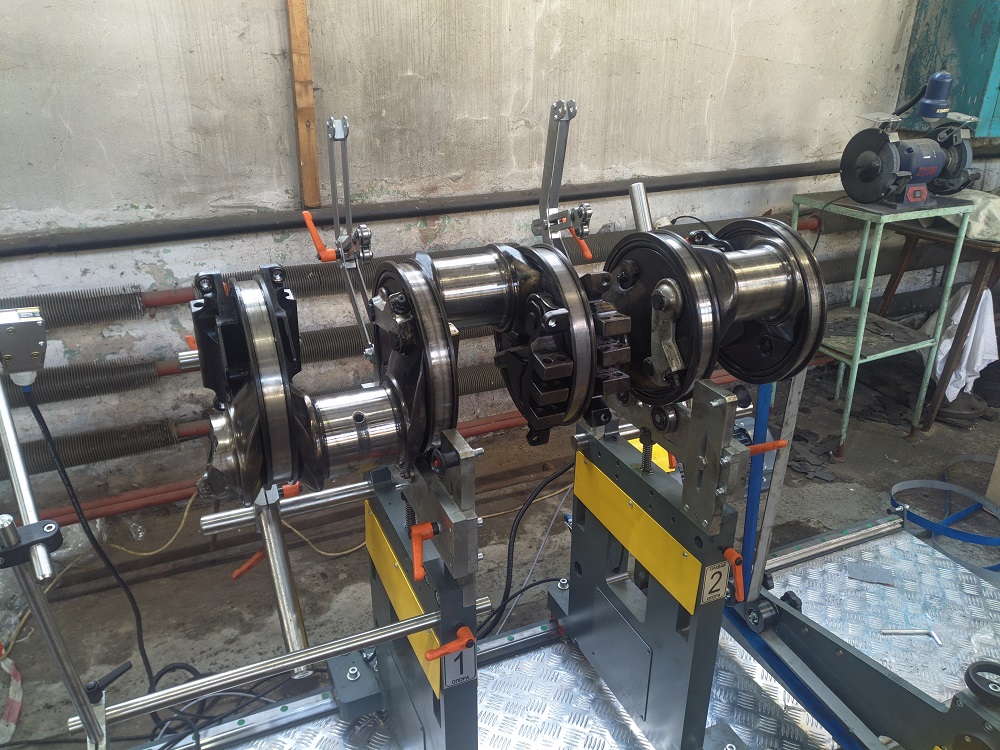
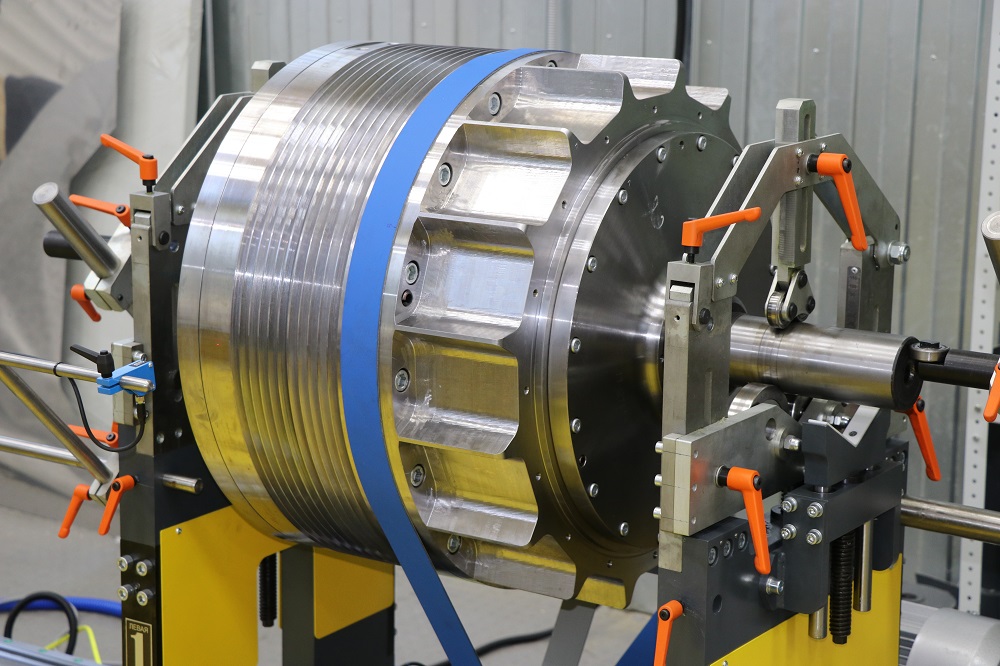
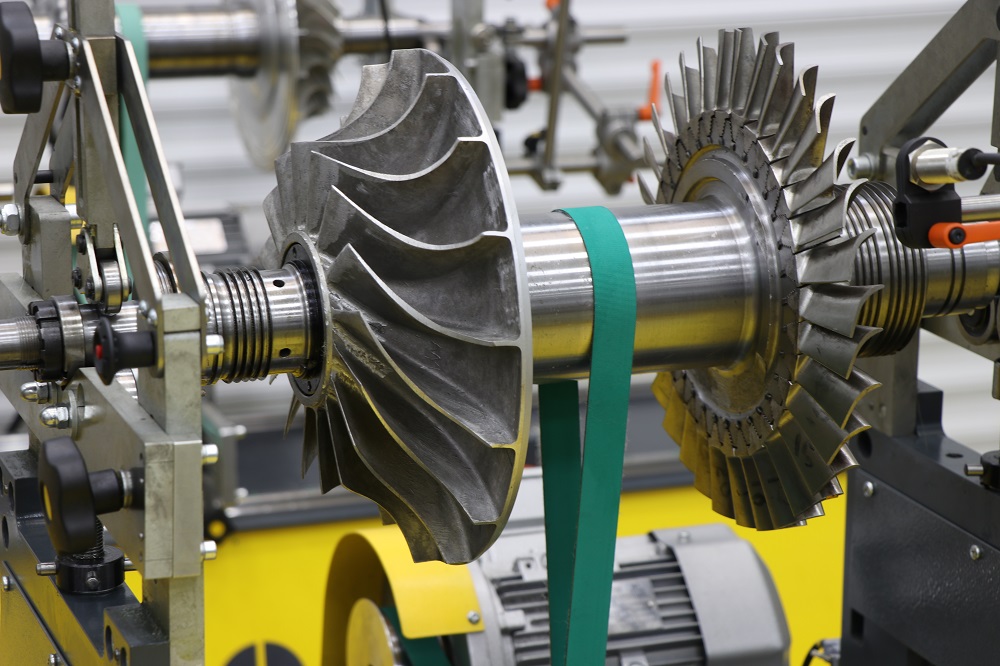
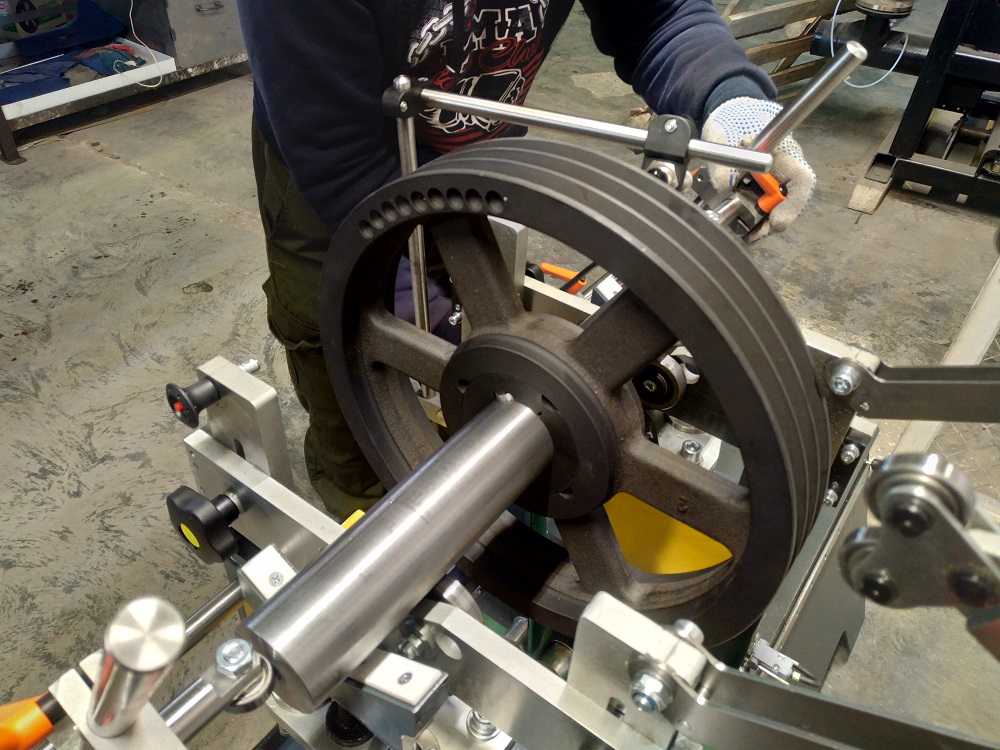
Laiaulatuslik horisontaalse pöörlemisteljega tasakaalustusmasin on mõeldud selliste detailide dünaamiliseks tasakaalustamiseks nagu suuremõõtmelised elektrimootorite ankrud, ventilaatorid, tsentrifuugid, pumbad, rongide rattapaarid, tekstiilvõllid, turbiinid, kummist survevõllid, tsentrifugaalrootorid, kuivatussilindrid ning peaaegu kõik rootorid, sõlmed ja detailid, mis vastavad massi ja mõõtmete poolest nõuetele.
Tõhus ja kvaliteetne tasakaalustamine on tagatud konstruktsiooni täiuslikkusega, valmistuskvaliteediga ja kaasaegse arvutisignaaltöötluse algoritmiga. Masinat toodetakse seeriana juba aastaid, see on töökindel ja remonditõhus.
Balanssermasina tehnilised andmed
** Rihtmekäituse sõlm on paigaldatud tugede taha / rihtmekäituse sõlm on tugede vahel.
*** Masina pikkust on võimalik ka vähendada.
Enamik parameetreid saab muuta kliendi nõudmisel.
Rakendus
Eelised
- Minimaalne saavutatav jääkebalanss 0,25 gxmm/kg.
- Ebabilansi vähenemine ühe käivituse jooksul kuni 95%.
- Väga lineaarne näitude täpsus kõikides kiiruse- ja tasakaalutusvahemikes.
- Tugipostid on paigaldatud 2 veerelaagriplokiga kõvastatud ja lihvitud raalsuundikutele, tagades üle 12-kordse tugevusvaru ja samas lihtsa tugiposti liigutatavuse "käsitsi" ilma täiendava tööriista või mehhanismita.
- Rullplokid on varustatud V-kujulise seadeldisega, mis võimaldab tasakaalustada rootoreid nende endi laagrites.
- Spetsiaalne seadeldis, mis võimaldab tasakaalustada rootoreid, millel on väike vahe tugikaelade vahel.
- Õhurõhu reguleerimine, manomeeter ja pingestussüsteemi juhtkang on koondatud ühte plokki.
- Rekordkiire ümberseadistamine ühest rootori tüübist teise.
- Pikaajalised tugirullid pinnase kõvadusega 60HRC SKF laagritega.
- Võimalus paigaldada masind ebaühtlustele madala kvaliteediga pindadele ning vabalt masinat teisaldada, kasutades taktikat "Masin rootori juurde".
- Suurepärane, aastatepikkuse tootmisega lihvitud konstruktsioon, mis sisaldab paljude tööstusharude laia kasutuskogemust ja nõuab minimaalset hooldust.
- Ülematu mitmekülgsus.
- Kiire omandamine.
- Hea Euroopa tööstuslik armatuur – kõik on käepidemetega. Seadistamiseks ja tööks on tööriistu peaaegu vaja.
- Usaldusväärne, jäik ja vibratsiooni summutav alus libisemiskindla pinnasega.
- Võimalus tasakaalustada rootoreid, millel on suur algne tasakaalutus.
- Mugavad ja tehnoloogilised ümberpaigutatavad toetused/džäkid rootori massi sujuvaks ülekandmiseks masina rullidele.
- Asünkroonne sagedusjuhitav ajam tagab sujuva pideva kiiruse muutmise ja laia valiku kiirendus-/pidurdusrežiimide võimalusi.
Tarkvara
Tarkvara «R-Bal V3.9», nagu ka riistvara, on ettevõtte OÜ «PK Robals» arendus ning seda täiustatakse pidevalt. Sellel on lihtne ja intuitiivne kasutajaliides.
|
|
|
Rootori tasakaalustamise aken
Katsetuste aken
|
Võnkumiste amplituudi ja faasi sõltuvuse graafik pöörlemiskiirusest 
Katsetuste kontrollleht Umar
|



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Käivitamise ja seadistustööd ning oskuste üleviimine

Tasakaalustusmasina soetamisel pakume kahte tüüpi käivitamise ja seadistustöid: paigaldusinseneri otsene sõit kliendi juurde ja masina kaugkäivitamine.
Kaasaegne tasakaalustusmasin on üsna keerukas seade ning kvalifitseeritud tööjõu puuduse tingimustes on eriti oluline spetsialistide kvaliteetne ettevalmistus. Seetõttu pakume abi personali koolitamisel. Tasakaalustusmasina operaatori ettevalmistamise käigus antakse edasi oskusi masina kasutamiseks ja rootorite dünaamilise tasakaalustamise põhimõtteid.
Suurepäraseks abivahendiks masina operaatorile on programm "Tasakaasujuht: multimeediakursus tasakaalustusmasinal tööks ettevalmistumiseks". Multimeediakursus koosneb videote seeriast, mis annavad lühikirjelduse tasakaalustusprotsessis kasutatavate terminite kohta, kirjeldavad rootorite tüüpe, tasakaalutususe tekkepõhjuseid ja tüüpe, peamisi parandusmeetodeid, toovad välja ohutuseeskirjad masinal töötamisel, masina komponentidega koostöö põhimõtted ning kirjeldavad kõiki tasakaalustusmasina tööd juhtiva tarkvara funktsioone.
Programm on kasutatav teadmiste kordamiseks, mis on omandatud käivitamise ja seadistustööde käigus.



