





KIRJELDUS
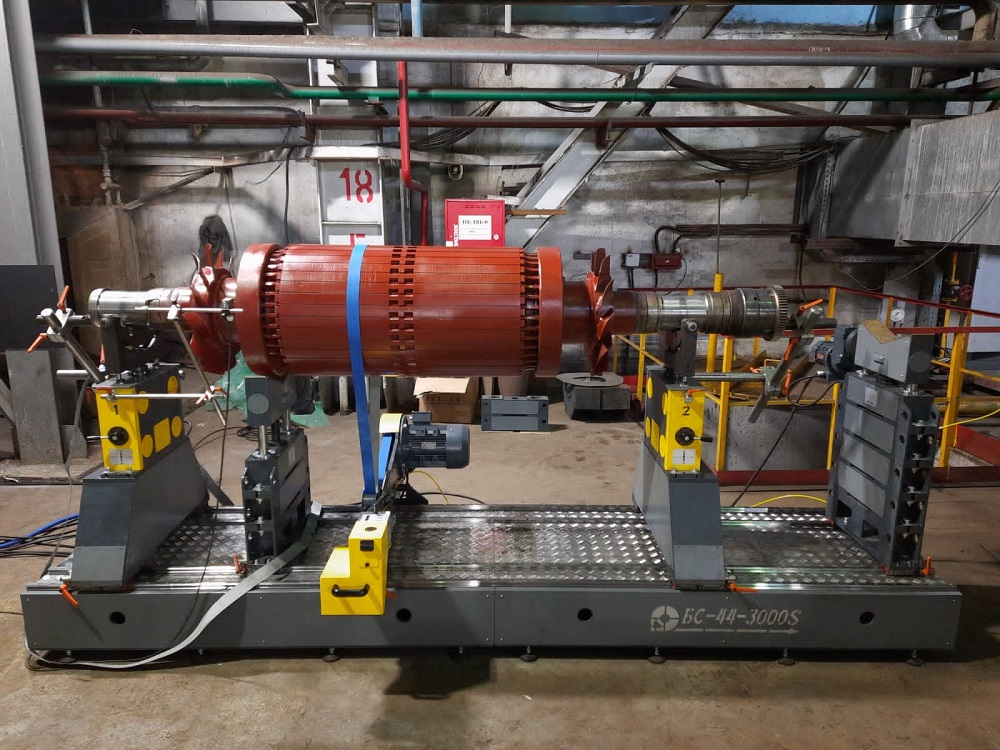
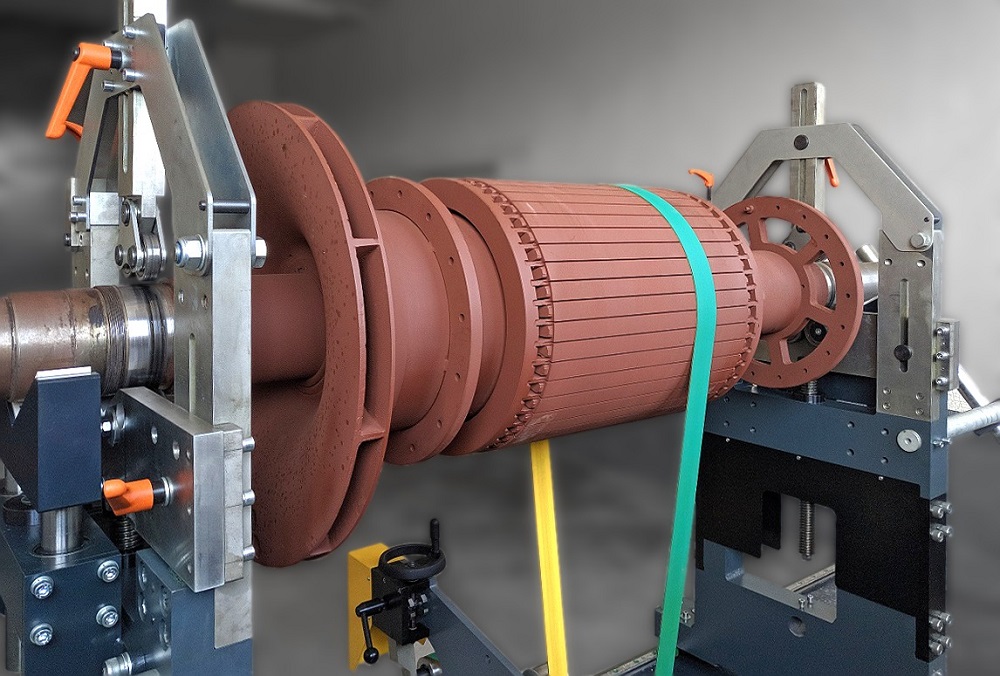
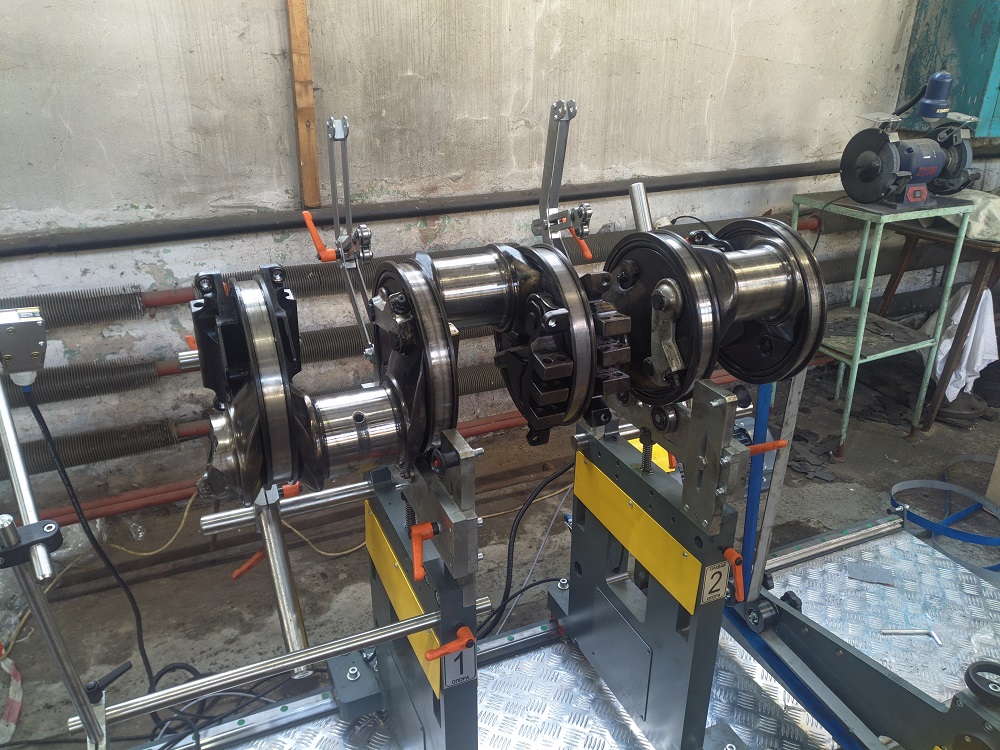
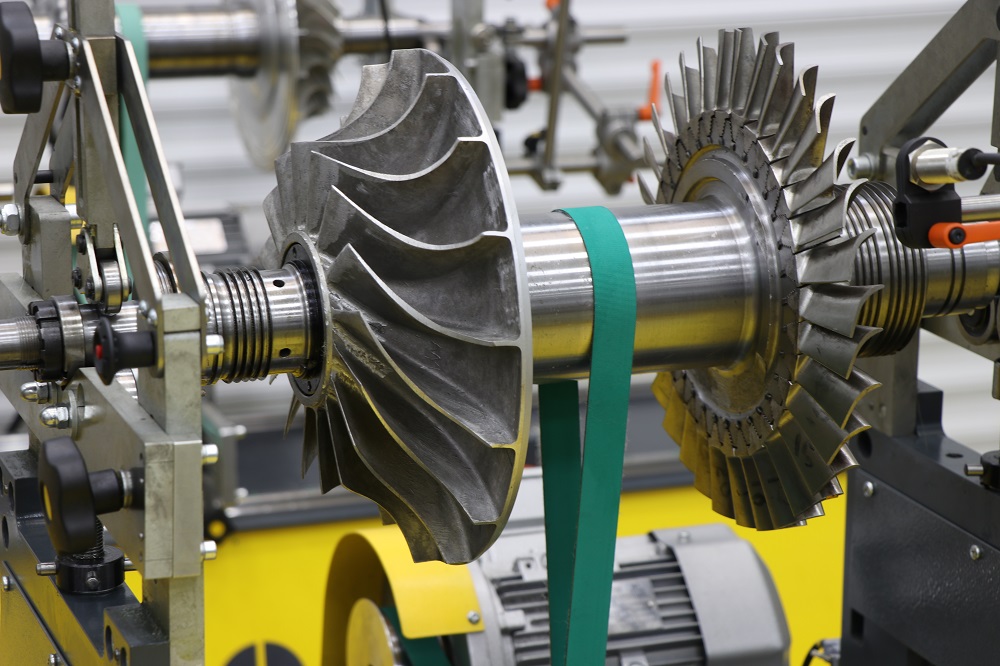
Laiaulatuslik universaalne tasakaalustusmasin horisontaalse pöörlemisteljega on mõeldud miniatuursete rootorite, nagu elektritööriistade mootorite ankrud, autoturbiinid, väikemõõtmelised magnetmootorid, ning peaaegu kõikide massi ja mõõtmetelt sobivate rootorite, sõlmede ja detailide seeriavõtteks täppisdünaamiliseks tasakaalustamiseks.
Tõhusat ja kvaliteetset tasakaalustamist tagab konstruktsiooni täiuslikkus, valmistuskvaliteet ning kaasaegne signaalide arvutitöötluse algoritm.
Balanssermasina tehnilised andmed
Sõltuvalt ülesannetest saab iga masinat varustada täiendava tööriistaga.
Garantiiaeg on pikendatud 24 kuule. Põhikomponentide pidev saadavus laos.
Masinat on võimalik tarnida spetsiaalse alusega.
Rakendus
Eelised
- Minimaalne saavutatav jääkdisbalanss 0,05 gxmm/kg.
- Disbalanssi vähenemine kuni 95% ühe käivituse jooksul.
- Väga lineaarne näitude täpsus kõikides kiiruse- ja disbalanssi vahemikes.
- Disbalanssi määramine ilma kalibreerimiskäivitusteta enamiku rootorite puhul.
- Rekordkiire ümberseadistamine ühest rootori tüübist teise.
- Lihtne kontsenti- ja kahekontsentrootorite tasakaalustamine, isegi kui raskuskese asub tugede taga.
- Pikaajalised tugirullid pinnase kõvadusega 60HRC SKF laagritel.
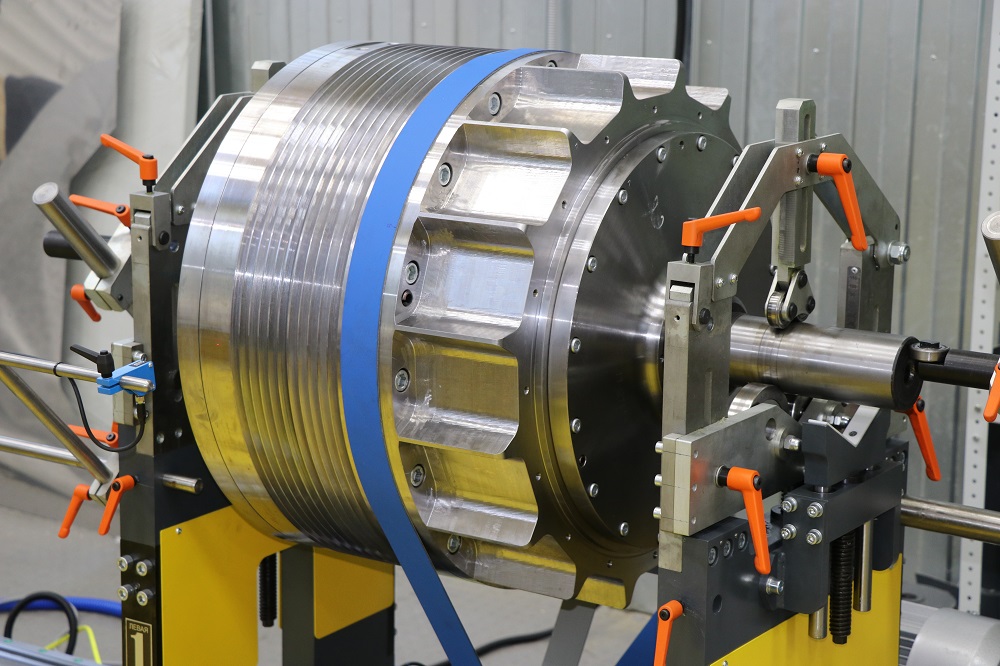
- Väga kvaliteetne, aastatepikkuse tootmisega lihvitud konstruktsioon, mis sisaldab suurt kogust kasutuskogemust kõikides tööstusharudes ja nõuab minimaalset hooldust.
- Suurepärane Euroopa tööstuslik tarvik – kõik on käepidemetega. Seadistamiseks ja töötamiseks on tööriistu peaaegu vaja.
Tarkvara
Tarkvara «R-Bal V3.9», nagu ka riistvara, on ettevõtte OÜ «PK Robals» arendus ning seda täiustatakse pidevalt. Sellel on lihtne ja intuitiivne kasutajaliides.
|
|
|
Rootori tasakaalustamise aken
Katsetuste aken
|
Võnkumiste amplituudi ja faasi sõltuvuse graafik pöörlemiskiirusest 
Katsetuste kontrollleht Umar
|



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
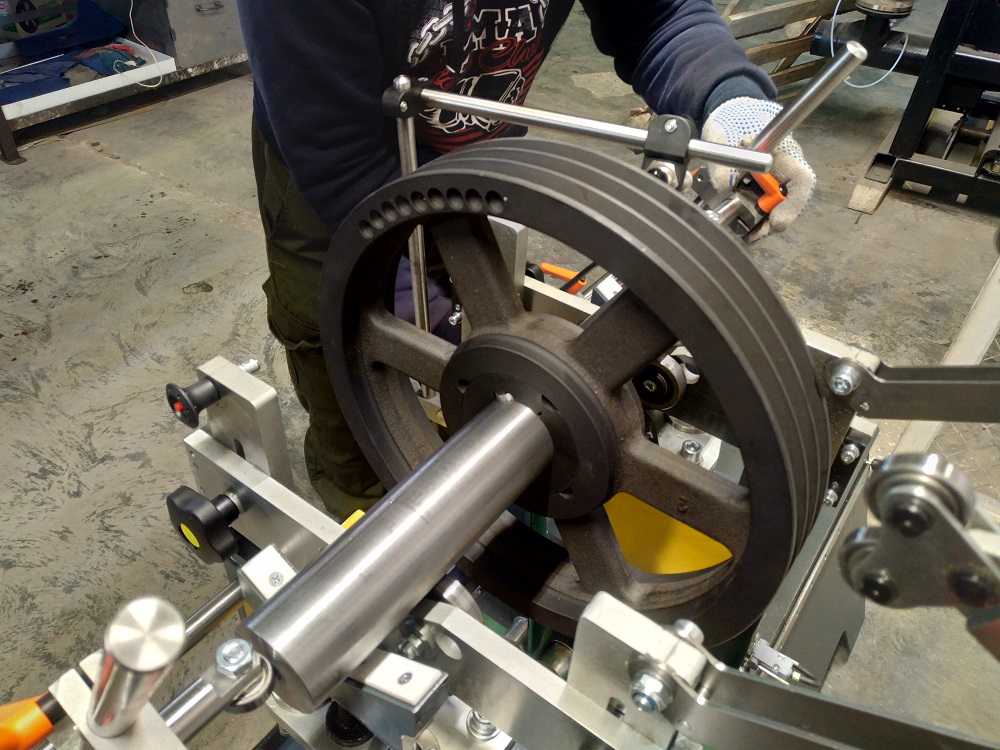
Käivitamise ja seadistustööd ning oskuste üleviimine

Tasakaalustusmasina soetamisel pakume kahte tüüpi käivitamise ja seadistustöid: paigaldusinseneri otsene sõit kliendi juurde ja masina kaugkäivitamine.
Kaasaegne tasakaalustusmasin on üsna keerukas seade ning kvalifitseeritud tööjõu puuduse tingimustes on eriti oluline spetsialistide kvaliteetne ettevalmistus. Seetõttu pakume abi personali koolitamisel. Tasakaalustusmasina operaatori ettevalmistamise käigus antakse edasi oskusi masina kasutamiseks ja rootorite dünaamilise tasakaalustamise põhimõtteid.
Suurepäraseks abivahendiks masina operaatorile on programm "Tasakaasujuht: multimeediakursus tasakaalustusmasinal tööks ettevalmistumiseks". Multimeediakursus koosneb videote seeriast, mis annavad lühikirjelduse tasakaalustusprotsessis kasutatavate terminite kohta, kirjeldavad rootorite tüüpe, tasakaalutususe tekkepõhjuseid ja tüüpe, peamisi parandusmeetodeid, toovad välja ohutuseeskirjad masinal töötamisel, masina komponentidega koostöö põhimõtted ning kirjeldavad kõiki tasakaalustusmasina tööd juhtiva tarkvara funktsioone.
Programm on kasutatav teadmiste kordamiseks, mis on omandatud käivitamise ja seadistustööde käigus.



